无刷电机初调
BRUCE
posted @ 2012年3月25日 10:14
in 系统
, 1335 阅读
最近还做了个小实验,无刷电机驱动,这个电机的的驱动方法还真的比较复杂,不想直流电机 步进电机,给电平就能转,既要驱动电路保护驱动,还要程序上的事实电平转换驱动,结合起来还是不容易的。只是一直比较懒每次都是弄一半一半的, 这回终于把小实验做了。但还是开环的驱动程序。
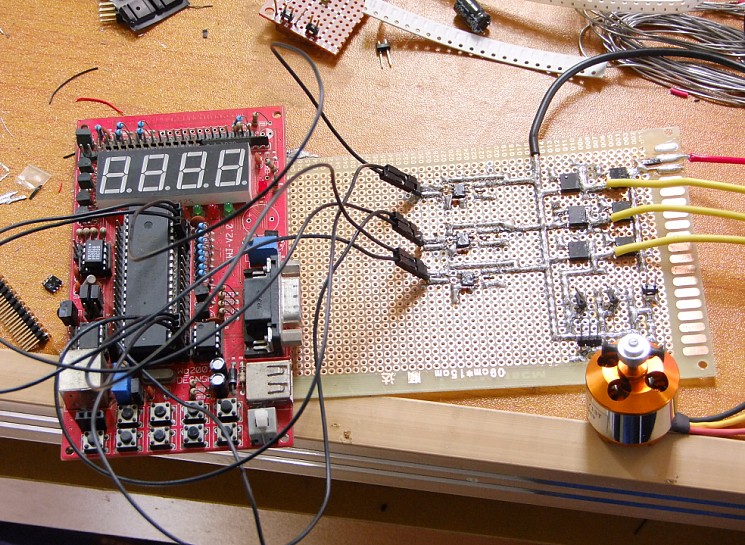
为了做准确的做PWM 输出,PWM 端口控制必须要在程序中断中做出,而且要及时,指令过多 或判断过多都会影响pwm 的准确控制,
贴出51 做的一部分代码,虽然pwm 的输出效果还是比较不错的,占空比都能很好的控制准确,但示波器看出换相还是 存在很大的问题,看来也需要做入中断或另一种控制方式
void isr_t1(void) interrupt 1 using 1
{
bit PWM_STATE;
EA=0;
TH0=0xFF;
TL0=0xD2;
IT_Count++;
Conne_Count++;
if(IT_Count<=Freq/10*Dutyfactor)
PWM_STATE=L;
else PWM_STATE=H;
if(IT_Count>=Freq) {IT_Count=0;}
/*-------------------------------------------------
Control undown arm of the mosfet
--------------------------------------------------*/
switch(PWM_Count & 0xE0)
{
case PWM_OUTA:
PWM_A=PWM_STATE;
PWM_B=L;
PWM_C=L;
_nop_();_nop_();
if(PWM_Count & MOSD_B)
{PWM_D_A=L;PWM_D_B=H;PWM_D_C=L;}
else
if(PWM_Count & MOSD_C)
{PWM_D_A=L;PWM_D_B=L;PWM_D_C=H;}
else
{PWM_D_A=L;PWM_D_B=L;PWM_D_C=L;}
break;
/*-------------------------------------------------*/
case PWM_OUTB:
PWM_A=L;
PWM_B=PWM_STATE;
PWM_C=L;
_nop_();_nop_();
if(PWM_Count & MOSD_C)
{PWM_D_A=L;PWM_D_B=L;PWM_D_C=H;}
else
if(PWM_Count & MOSD_A)
{PWM_D_A=H;PWM_D_B=L;PWM_D_C=L;}
else
{PWM_D_A=L;PWM_D_B=L;PWM_D_C=L;}
break;
/*--------------------------------------------------*/
case PWM_OUTC:
PWM_A=L;
PWM_B=L;
PWM_C=PWM_STATE;
_nop_();_nop_();
if(PWM_Count & MOSD_A)
{PWM_D_A=H;PWM_D_B=L;PWM_D_C=L;}
else
if(PWM_Count & MOSD_B)
{PWM_D_A=L;PWM_D_B=H;PWM_D_C=L;}
else
{PWM_D_A=L;PWM_D_B=L;PWM_D_C=L;}
break;
/*--------------------------------------------------*/
default :
PWM_A=L;PWM_B=L;PWM_C=L;
PWM_D_A=L;PWM_D_B=L;PWM_D_C=L;
break;
}
/*--------------------end switch--------------------*/
EA=1;
}
 评论 (0)
评论 (0)